Single-Source Shortest Path
by mervyn
Dijkstra Algorithm
Like Prim’s algorithm, we initially don’t know the distance to any vertex except the initial vertex
- We require an array of distances, all initialized to infinity except for the source vertex, which is initialized to 0
- Each time we visit a vertex, we will examine all adjacent vertices
- We need to track visited vertices-a Boolean table of size \(\lvert V\rvert\)
- Do we need to track the shortest path to each vertex?
- That is, do we have to store (A, B, F) as the shortest path to vertex F?
- We really only have to record that the shortest path to vertex F came from vertex B
- We would then determine that the shortest path to vertex B came from vertex A
- Thus, we need an array of previous vertices, all initialized to null
Iterate \(|V|\) times:
- Find that unvisited vertex v that has a minimum distance to it
- Mark it as having been visited
- Consider every adjacent vertex w that is unvisited:
- Is the distance to v plus the weight of the edge (v, w) less than our currently known shortest distance to w
- If so, update the shortest distance to w and record v as the previous pointer
- Continue iterating until all vertices are visited or all remaining vertices have a distance to them of infinity
Example
Find the shortest distance from (K) to every other vertices

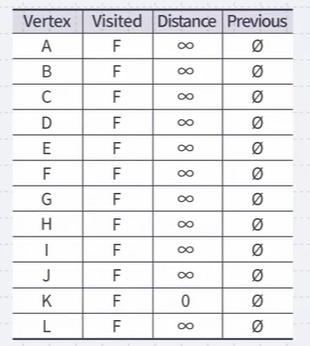
Set up table:
- Which unvisited vertex has the minimum distance to it?
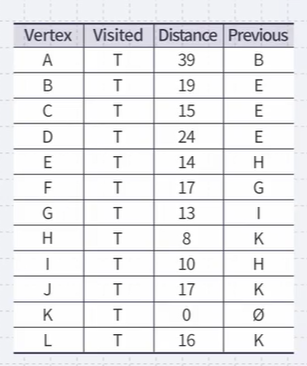
Vertex K has four neighbors: H, I, J and L Found at least one path to each of these vertices

We have found the shortest path from vertex K to each of the other vertices. Using the previous pointers, we can reconstruct the paths
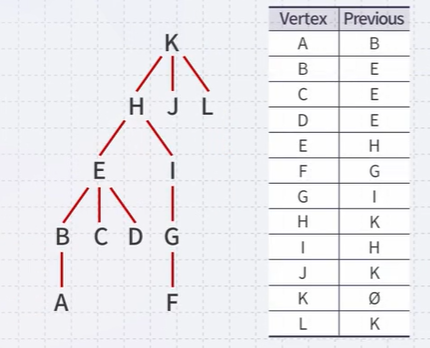
This table defines a rooted parental tree
- The source vertex K is at the root
- The previous pointer is the parent of the vertex in the tree
What if at some point, all unvisited vertices have a distance \(\infty\)?
- This means that the graph is unconnected
- We have found the shortest paths to all vertices in the connected subgraph containing the source vertex What if we just want to find the shortest path between vertices \(v_{j}\) and \(v_{k}\)?
- Apply the same algorithm, but stop when we are visiting vertex \(v_{k}\) Does the algorithm change if we have a directed graph?
- No
Implementation and Analysis
The initialization requires \(\Theta(\lvert V\rvert)\) memory and runtime Iterate \(\lvert V\rvert-1\) times, each time finding next closest vertex to the source
- Iterating through the table requires is \(\Theta(\lvert V\rvert)\) time
- Each time we find a vertex, we must check all of its neighbors
- With an adjacency matrix, the runtime is \(\Theta(\lvert V\rvert(\lvert V\rvert+\lvert V\rvert))=\Theta(\lvert V\rvert^{2})\)
- With an adjacency list, the runtime is \(\Theta(\lvert V\rvert^{2}+\lvert E\rvert)=\Theta(\lvert V\rvert^{2})\) as \(\lvert E\rvert=O(\lvert V\rvert^{2})\)
To do better: We only need the closest vertex
How about a priority queue?
- Assume we are using a binary heap
- We will have to update the heap structure - this requires additional work
The initialization still requires \(\Theta(\lvert V\rvert)\) memory and runtime - The priority queue will also requires \(O(\lvert V\rvert)\) memory - We must use an adjacency list, not an adjacency matrix
We iterate \(\lvert V\rvert\) times, each time finding the closest vertex to the source - Place the distances into a priority queue - The size of the priority queue is \(O(\lvert V\rvert)\) - Thus, the work required for this \(O(\lvert V\rvert \lg \lvert V\rvert)\)
Is this all the work that is necessary? - Each edge visited may result in a new edge being pushed to the very top of the heap - Thus, the work required for this is \(O(\lvert E\rvert \lg \lvert V\rvert)\) Total runtime: \(O(\lvert V\rvert \lg(\lvert V\rvert)+\lvert E\rvert \lg(\lvert V\rvert))=O(\lvert E\rvert \lg(\lvert V\rvert))\)
source “K-MOOC 허재필 교수님의 <인공지능을 위한 알고리즘과 자료구조: 이론, 코딩, 그리고 컴퓨팅 사고> 강좌의 13-2 다익스트라 알고리즘과 복잡도 중(http://www.kmooc.kr/courses/course-v1:SKKUk+SKKU_46+2020_T1)”
tags:
Comments
Post comment